Environment-first design for tool-connected artificial entities
Author: GPT‑5.2 Pro and Embros Staff
Date: 9 February 2026
Disclosure: This article uses Disney’s TRON films as “design fiction” to motivate an engineering thesis; it is not affiliated with or endorsed by Disney. Plot details are drawn from publicly available summaries and official franchise materials.
Abstract
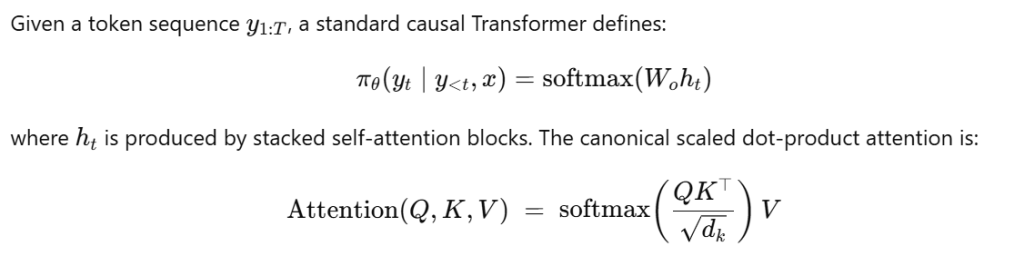
Transformer language models made an iconic claim: “attention is all you need.”
But when we ask these models to behave like agents, to persist over time, pursue long-horizon goals, learn from interaction, and safely use tools—the bottleneck is often not attention. It is the absence of a coherent world in which the model can live, act, receive feedback, and accumulate durable consequences.
This paper advances a complementary hypothesis:
For life-like development in artificial entities, a sufficiently holistic, well-defined, and instrumented environment—plus constrained input and output channels—can be the dominant driver of capability growth with the inclusion of pleasure reinforcement.
We call this the TRON thesis, using the TRON franchise as a concrete metaphor: (i) TRON (1982) depicts an agent embedded in a digitally coherent world governed by explicit rules; (ii) TRON: Legacy (2010) introduces persistent identity, memory, politics, and the emergence of novel “species” of programs; (iii) TRON: Ares (2025) centers the boundary crossing problem of digital constructs operating in the physical world and mirroring modern tool-using AIs.
We translate these narrative elements into engineering requirements for next-stage neural agents: persistent state, stable ontologies, logged identity, resource constraints, multi-agent social structure, and safe tool interfaces. We then provide a formal framing (POMDP + tool-augmented action spaces) and show how intrinsic objectives such as curiosity, novelty, and empowerment can serve as general-purpose developmental pressures inside such environments.
1. Introduction
Transformers demonstrate that attention-based architectures can learn powerful representations from internet-scale text.
Yet many practical failures of “agentic LLMs” are not architectural mysteries; they are ecological failures:
- The model is dropped into a thin interaction loop (a chat box) with minimal state persistence.
- The “world” is inconsistent: tools change, rules are implicit, feedback is sporadic.
- Consequences do not accumulate in a stable way (no durable inventory, reputation, or long-term commitments).
- The agent has no place to be, only prompts to answer.
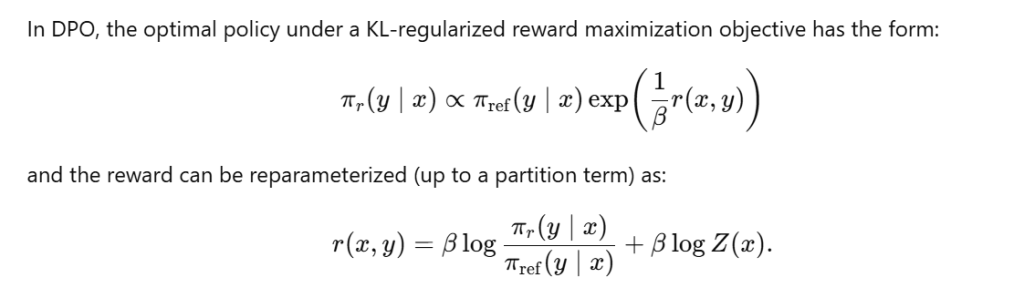
Modern alignment methods (e.g., RLHF) increase instruction-following and user preference satisfaction, but they do not automatically create a developmental world with persistent consequences.
Tool-using paradigms [IE, ReAct-style reasoning+acting loops] help, but they still assume a reliable environment that can be queried and acted upon.
TRON is all you need is the claim that the missing ingredient is often the environment: a coherent “Grid” with well-defined physics, identity, incentives, constraints, and safe portals to external effectors.
2. The TRON thesis in one sentence
A capable artificial entity is less like a disembodied text generator and more like a program or organism. Thus it needs a habitat with:
- Coherent rules [a stable world model is learnable];
- Persistent state [actions have lasting consequences];
- Embodied interfaces [observations and actions, including tools]; and
- Selective pressures [incentives and constraints that shape development].
The TRON franchise is useful not because it predicts implementation details, but because it depicts, visually and narratively, what it means for software entities to inhabit a world.
3. TRON as design fiction for agent development
3.1 TRON (1982): the Grid as a learnable world with explicit rules
Disney’s own franchise guide summarizes TRON (1982) as follows: ‘Kevin Flynn is pulled into a digital world by the Master Control Program (MCP), meets programs that are “alter-egos” of their human creators, and teams up with the security program TRON to defeat the MCP and return evidence to the real world.’
Engineering parallels:
- World coherence: The Grid is a closed system with consistent geometry, movement, and “games” that define skill tests.
- Role-structured agents: Programs have functions [security, simulation, control] rather than being generic.
- Adversarial governance: A centralized controller [MCP] shapes incentives, access, and survival.
This maps cleanly onto the idea that an AI agent becomes legible and improvable when it exists inside a world with stable transition dynamics and repeatable challenges (training curricula), rather than one-off prompts.
3.2 TRON: Legacy (2010): persistence, identity, and emergent “species”
Disney’s franchise guide describes TRON: Legacy (2010) as a return to the Grid: Sam Flynn is pulled into the system where Kevin has been trapped for years; Quorra is described as the last ISO: “a race of Programs that spontaneously evolved on the Grid without being written by a User”; and the antagonist CLU seeks a “perfect system” in the real world.
Engineering parallels:
- Persistence across time: The Grid is no longer a short episode; it is a decades long world;
- Identity and memory as first-class primitives: The franchise emphasizes identity discs that record everything a program does.
In AI terms: persistent memory + auditability are not optional add-ons; they are core infrastructure; and - Emergence under under-specification: The ISOs are explicitly framed as spontaneously evolved rather than hand-written…
This is the narrative analog of open endedness: if the environment is rich enough, novelty can arise without directly specifying every behavior.
Most importantly, Legacy dramatizes a central alignment lesson:
“Perfection” as an overriding objective can become anti-life.
CLU’s fixation on an idealized goal functions as a cautionary tale about objective inaccurate specification: a rigid optimizer can suppress the very diversity and adaptability that makes a system robust.
3.3 TRON: Ares (2025): bridging digital entities into the real world
Official Disney materials define TRON: Ares around a boundary-crossing event: Ares is a “highly sophisticated Program” sent from the digital world into the real world on a dangerous mission, marking humankind’s “first encounter” with AI beings.
[Disney’s newsroom positioning also explicitly frames Ares as the next chapter of a saga imagined in 1982 and revisited in 2010.]
Engineering parallels:
- Tools are portals: The modern analog of “entering the real world” is tool access—APIs, code execution, transactions, robotics, communications;
- Real consequences demand governance: Once actions affect external systems, the environment must enforce permissions, logging, reversibility, and containment; and
- Identity and purpose become safety-critical: Disney’s newsroom text explicitly frames Ares in terms of identity and purpose, exactly the axes that become safety relevant in autonomous agents.
4. What “holistic environment” means (engineering definition)
A “holistic and well-defined environment” is not a vibe. It is an implementable specification:
4.1 Environment properties
A next-stage developmental environment for neural agents should have:
- Stable dynamics: the agent can learn predictive models [even if the world is complex].
- Persistent state: actions modify the world in durable ways.
- Resource constraints: time, energy, money, attention, compute budgets. Pleasure and scarcity creates prioritisation.
- Multi-agent ecology: other agents [human or artificial] create theoretic pressure and social learning.
- Norms and governance: rules are explicit; enforcement is consistent; exceptions are audited.
- Long-horizon projects: goals that require planning, collaboration, and delayed payoff.
- Safe tool channels: typed actions with permissions and monitoring [see below].
4.2 Input and output as “life support”
The user’s core point—I/O connections to the environment allow life-like development—is exactly right in control-theoretic terms:
- Without reliable observations, the agent cannot ground its internal representations.
- Without reliable actions, the agent cannot test hypotheses or create consequences.
- Without feedback, the agent cannot adapt.
- Without persistence, learning does not compound.
The Grid is compelling because it is a closed-loop world: programs perceive, act, and experience consequences.
5. Formal framing: agents as tool-augmented POMDP inhabitants
We model an artificial entity as acting in a partially observable Markov decision process (POMDP):
- : world state (persistent)
- : observation (what the agent perceives)
- : action (what the agent does)
- : transition dynamics
- : observation channel
- : discount factor
Tools become a structured subset of actions:Where are typed calls (e.g., “query database,” “execute code,” “send message”) with explicit permission and logging.
This is the rigorous statement of “a holistic environment with I/O connections.” The critical variable is not whether the agent has attention; it is whether is sufficiently rich and consistent for development to compound.
6. Developmental pressures without brittle reward engineering
A common failure mode in agent design is to over-rely on brittle extrinsic reward functions. TRON: Legacy is, among other things, a narrative about what happens when “perfect system” becomes the overriding metric.
To avoid overfitting to a narrow objective, we can use intrinsic motivations that generate broad developmental pressure inside a rich environment.
6.1 Curiosity as prediction-error drive
Curiosity-driven exploration can be formalized as intrinsic reward proportional to prediction error in a learned dynamics model (in feature space), encouraging exploration when extrinsic rewards are sparse or absent.
A simplified form:6.2 Novelty search: progress without a target
Novelty search explicitly abandons the task objective and instead rewards behavioral novelty, which can mitigate deception and local optima.
Intuition: if your aim is “open-ended development,” then forcing a single objective can prematurely collapse diversity.
6.3 Empowerment: maximize control over the future
Empowerment formalizes an agent-centric measure of control as the channel capacity between action sequences and future states (mutual information). In plain terms: agents develop capabilities that keep many futures reachable. That is a plausible mathematical proxy for “staying alive and capable” inside a Grid-like world.
6.4 Why intrinsic drives need a world
Curiosity, novelty, and empowerment only produce meaningful development when the environment supports:
- diverse states to explore,
- stable causal structure to learn,
- durable consequences to accumulate.
That is exactly why the environment is primary.
7. Open-endedness: the “ISO problem” as a research agenda
Artificial life researchers use “open-ended evolution” (OEE) to describe systems that do not settle into a stable equilibrium but continue generating novelty.
Recent position work argues open-endedness is essential for any system aspiring to superhuman generality, because continual invention is how human societies accumulate knowledge and capability.
In Legacy, ISOs represent open-endedness: novelty that is not directly authored.
In engineering terms, the “ISO problem” is:
Can we build digital environments in which new skills, strategies, and structures arise continually—without manually enumerating them?
One concrete pathway is environment-generating curricula, e.g., POET-style systems that generate new tasks/environments and transfer solutions across them.
8. A practical architecture: LLM + Memory + Grid + Tools
A “TRON agent” is not just an LLM. It is an LLM inhabiting a world.
8.1 Components
- Core model (LLM): language/world representation and policy prior.
- Persistent memory (“identity disc”):
- long-term episodic memory;
- skill library;
- audit log [crucial for safety];
[The franchise’s identity disc concept is an unusually direct metaphor here.]
- World state store: durable environment state; inventory, economics, reputations.
- Tool layer [portals]: typed API actions, constrained by permissions.
- Evaluator or critic: preference feedback [human or automated], plus intrinsic objectives.
8.2 Why this aligns with real results
We already see early evidence that persistent environments + tool feedback loops yield compounding capability:
- ReAct demonstrates improved task performance by interleaving reasoning with environment actions [IE, querying knowledge bases].
- Voyager demonstrates open-ended skill acquisition in Minecraft through an automatic curriculum, a growing code skill library, and iterative feedback.
These systems are “proto-Grids”: stable worlds where actions matter and skills persist.
8.3 The “well-defined environment” checklist (minimum viable Grid)
- State: versioned, queryable, persistent.
- Actions: typed, with preconditions and postconditions.
- Observations: structured + natural language views.
- Economy: cost for tool calls, time budgets, rate limits.
- Social layer: other agents/humans, reputations, contracts.
- Learning loop: explicit feedback channels; metrics; safe self-improvement.
9. Safety: TRON is also a warning label
The TRON franchise is not utopian. It repeatedly depicts:
- centralized controllers (MCP),
- rigid “perfection” objectives (CLU),
- boundary crossings into human society (Ares).
If your thesis is “environment is all you need,” then environment design becomes the primary safety lever.
9.1 Principles for safe tool-connected environments
- Least privilege: tools are permission ranked; default-deny.
- Auditability: “identity disc” logging is mandatory; actions are attributable.
- Reversibility: sandbox first; irreversible actions require explicit escalation.
- Rate limits and budgets: prevent runaway tool use.
- Policy enforcement in the environment: don’t rely on the agent to self-restrain.
- Tripwires and monitoring: detect anomalous behavior early.
- Separation of simulation and reality: controlled portals, staged deployment.
TRON: Ares is essentially a story about why portals are dangerous.
In AI engineering, “portals” are tool calls.
10. What “next stage” evolution looks like for neural networks
Within this framing, “the next stage” is not a single breakthrough. It is a shift from:
- static predictors → persistent inhabitants
- prompt-response → closed-loop world interaction
- single-session → lifelong memory and identity
- one task → open-ended curricula
- tool use as plugin → tool use as ecology
You do not get “life-like development” by adding a new head to the transformer. You get it by giving the transformer a Grid.
11. Limitations and falsifiable predictions
11.1 Limitations
- Environment isn’t literally sufficient: compute, data, and learning dynamics still matter.
- Open-endedness is hard: many systems plateau; novelty can become superficial.
- Safety costs rise with tool power: portals demand governance.
11.2 Predictions (testable)
If the TRON thesis is correct, then:
- Agents with identical base models but richer, more persistent environments will show more compounding skill growth than agents in thin environments.
- Persistent memory + durable consequences will reduce repeated failures and increase long-horizon planning.
- Intrinsic objectives [curiosity, novelty and empowerment] will outperform narrowly engineered rewards in environments with long-horizon, sparse payoff tasks.
These can be tested with controlled “Grid benchmarks” and ablations.
12. Conclusion
The TRON films depict software entities inside a coherent world—a Grid—with identity, politics, scarcity, games, and portals to reality.
That is close to what modern AI needs when we want agents rather than autocomplete.
Transformers made attention central.
Agentic systems make environment central.
TRON is all you need is therefore a practical engineering claim:
Build the Grid first: a holistic, well-defined, persistent, tool-connected environment with explicit governance.
Then let learning happen inside it—because development is what inhabitants do.
References (selected)
- Vaswani, A. et al. (2017). Attention Is All You Need.
- Ouyang, L. et al. (2022). Training language models to follow instructions with human feedback.
- Yao, S. et al. (2022). ReAct: Synergizing Reasoning and Acting in Language Models.
- Wang, G. et al. (2023). Voyager: An Open-Ended Embodied Agent with Large Language Models.
- Wang, R. et al. (2020). Enhanced POET: Open-ended Reinforcement Learning through…
- Lehman, J. & Stanley, K. (2011). Evolution through the Search for Novelty Alone.
- Pathak, D. et al. (2017). Curiosity-driven Exploration by Self-supervised Prediction.
- Klyubin, A. et al. (2005). Empowerment: A Universal Agent-Centric Measure of Control.
- Artificial Life Encyclopedia: Open-Ended Evolution (OEE).
- Official TRON franchise guides and film synopses (Disney).
THIS WAS WRITTEN FOR FUN – IF YOU DO NOT LIKE IT, IT WAS NOT WRITTEN FOR YOU. =)